new
Get trending papers in your email inbox once a day!
Get trending papers in your email inbox!
Subscribe
Disentangling Shape and Pose for Object-Centric Deep Active Inference Models
Active inference is a first principles approach for understanding the brain in particular, and sentient agents in general, with the single imperative of minimizing free energy. As such, it provides a computational account for modelling artificial intelligent agents, by defining the agent's generative model and inferring the model parameters, actions and hidden state beliefs. However, the exact specification of the generative model and the hidden state space structure is left to the experimenter, whose design choices influence the resulting behaviour of the agent. Recently, deep learning methods have been proposed to learn a hidden state space structure purely from data, alleviating the experimenter from this tedious design task, but resulting in an entangled, non-interpreteable state space. In this paper, we hypothesize that such a learnt, entangled state space does not necessarily yield the best model in terms of free energy, and that enforcing different factors in the state space can yield a lower model complexity. In particular, we consider the problem of 3D object representation, and focus on different instances of the ShapeNet dataset. We propose a model that factorizes object shape, pose and category, while still learning a representation for each factor using a deep neural network. We show that models, with best disentanglement properties, perform best when adopted by an active agent in reaching preferred observations.


Contrastive Active Inference
Active inference is a unifying theory for perception and action resting upon the idea that the brain maintains an internal model of the world by minimizing free energy. From a behavioral perspective, active inference agents can be seen as self-evidencing beings that act to fulfill their optimistic predictions, namely preferred outcomes or goals. In contrast, reinforcement learning requires human-designed rewards to accomplish any desired outcome. Although active inference could provide a more natural self-supervised objective for control, its applicability has been limited because of the shortcomings in scaling the approach to complex environments. In this work, we propose a contrastive objective for active inference that strongly reduces the computational burden in learning the agent's generative model and planning future actions. Our method performs notably better than likelihood-based active inference in image-based tasks, while also being computationally cheaper and easier to train. We compare to reinforcement learning agents that have access to human-designed reward functions, showing that our approach closely matches their performance. Finally, we also show that contrastive methods perform significantly better in the case of distractors in the environment and that our method is able to generalize goals to variations in the background. Website and code: https://contrastive-aif.github.io/

Online Pareto-Optimal Decision-Making for Complex Tasks using Active Inference
When a robot autonomously performs a complex task, it frequently must balance competing objectives while maintaining safety. This becomes more difficult in uncertain environments with stochastic outcomes. Enhancing transparency in the robot's behavior and aligning with user preferences are also crucial. This paper introduces a novel framework for multi-objective reinforcement learning that ensures safe task execution, optimizes trade-offs between objectives, and adheres to user preferences. The framework has two main layers: a multi-objective task planner and a high-level selector. The planning layer generates a set of optimal trade-off plans that guarantee satisfaction of a temporal logic task. The selector uses active inference to decide which generated plan best complies with user preferences and aids learning. Operating iteratively, the framework updates a parameterized learning model based on collected data. Case studies and benchmarks on both manipulation and mobile robots show that our framework outperforms other methods and (i) learns multiple optimal trade-offs, (ii) adheres to a user preference, and (iii) allows the user to adjust the balance between (i) and (ii).
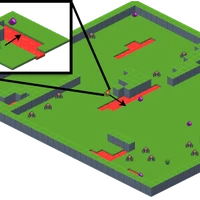
Object-Centric Scene Representations using Active Inference
Representing a scene and its constituent objects from raw sensory data is a core ability for enabling robots to interact with their environment. In this paper, we propose a novel approach for scene understanding, leveraging a hierarchical object-centric generative model that enables an agent to infer object category and pose in an allocentric reference frame using active inference, a neuro-inspired framework for action and perception. For evaluating the behavior of an active vision agent, we also propose a new benchmark where, given a target viewpoint of a particular object, the agent needs to find the best matching viewpoint given a workspace with randomly positioned objects in 3D. We demonstrate that our active inference agent is able to balance epistemic foraging and goal-driven behavior, and outperforms both supervised and reinforcement learning baselines by a large margin.
A call for embodied AI
We propose Embodied AI as the next fundamental step in the pursuit of Artificial General Intelligence, juxtaposing it against current AI advancements, particularly Large Language Models. We traverse the evolution of the embodiment concept across diverse fields - philosophy, psychology, neuroscience, and robotics - to highlight how EAI distinguishes itself from the classical paradigm of static learning. By broadening the scope of Embodied AI, we introduce a theoretical framework based on cognitive architectures, emphasizing perception, action, memory, and learning as essential components of an embodied agent. This framework is aligned with Friston's active inference principle, offering a comprehensive approach to EAI development. Despite the progress made in the field of AI, substantial challenges, such as the formulation of a novel AI learning theory and the innovation of advanced hardware, persist. Our discussion lays down a foundational guideline for future Embodied AI research. Highlighting the importance of creating Embodied AI agents capable of seamless communication, collaboration, and coexistence with humans and other intelligent entities within real-world environments, we aim to steer the AI community towards addressing the multifaceted challenges and seizing the opportunities that lie ahead in the quest for AGI.

Home Run: Finding Your Way Home by Imagining Trajectories
When studying unconstrained behaviour and allowing mice to leave their cage to navigate a complex labyrinth, the mice exhibit foraging behaviour in the labyrinth searching for rewards, returning to their home cage now and then, e.g. to drink. Surprisingly, when executing such a ``home run'', the mice do not follow the exact reverse path, in fact, the entry path and home path have very little overlap. Recent work proposed a hierarchical active inference model for navigation, where the low level model makes inferences about hidden states and poses that explain sensory inputs, whereas the high level model makes inferences about moving between locations, effectively building a map of the environment. However, using this ``map'' for planning, only allows the agent to find trajectories that it previously explored, far from the observed mice's behaviour. In this paper, we explore ways of incorporating before-unvisited paths in the planning algorithm, by using the low level generative model to imagine potential, yet undiscovered paths. We demonstrate a proof of concept in a grid-world environment, showing how an agent can accurately predict a new, shorter path in the map leading to its starting point, using a generative model learnt from pixel-based observations.
The Free Energy Principle for Perception and Action: A Deep Learning Perspective
The free energy principle, and its corollary active inference, constitute a bio-inspired theory that assumes biological agents act to remain in a restricted set of preferred states of the world, i.e., they minimize their free energy. Under this principle, biological agents learn a generative model of the world and plan actions in the future that will maintain the agent in an homeostatic state that satisfies its preferences. This framework lends itself to being realized in silico, as it comprehends important aspects that make it computationally affordable, such as variational inference and amortized planning. In this work, we investigate the tool of deep learning to design and realize artificial agents based on active inference, presenting a deep-learning oriented presentation of the free energy principle, surveying works that are relevant in both machine learning and active inference areas, and discussing the design choices that are involved in the implementation process. This manuscript probes newer perspectives for the active inference framework, grounding its theoretical aspects into more pragmatic affairs, offering a practical guide to active inference newcomers and a starting point for deep learning practitioners that would like to investigate implementations of the free energy principle.
Cognition-of-Thought Elicits Social-Aligned Reasoning in Large Language Models
Large language models (LLMs) excel at complex reasoning but can still exhibit harmful behaviors. Current alignment strategies typically embed safety into model weights, making these controls implicit, static, and difficult to modify. This paper introduces Cognition-of-Thought (CooT), a novel decoding-time framework that equips LLMs with an explicit cognitive self-monitoring loop. CooT couples a standard text Generator with a cognitive Perceiver that continuously monitors the unfolding sequence. The Perceiver uses a structured, precedence-based hierarchy of principles (e.g., safety over obedience) to detect potential misalignments as they arise. When violations are flagged, CooT intervenes by rolling back the generation to the point of error and regenerating under injected guidance that combines universal social priors with context-specific warnings. CooT thus transforms alignment from a fixed property into an explicit, dynamic, and auditable process active during inference, allowing for flexible policy updates without retraining the model. Extensive experiments across multiple benchmarks and model families confirm that CooT consistently improves safety and social reasoning performance.
Mixtral of Experts
We introduce Mixtral 8x7B, a Sparse Mixture of Experts (SMoE) language model. Mixtral has the same architecture as Mistral 7B, with the difference that each layer is composed of 8 feedforward blocks (i.e. experts). For every token, at each layer, a router network selects two experts to process the current state and combine their outputs. Even though each token only sees two experts, the selected experts can be different at each timestep. As a result, each token has access to 47B parameters, but only uses 13B active parameters during inference. Mixtral was trained with a context size of 32k tokens and it outperforms or matches Llama 2 70B and GPT-3.5 across all evaluated benchmarks. In particular, Mixtral vastly outperforms Llama 2 70B on mathematics, code generation, and multilingual benchmarks. We also provide a model fine-tuned to follow instructions, Mixtral 8x7B - Instruct, that surpasses GPT-3.5 Turbo, Claude-2.1, Gemini Pro, and Llama 2 70B - chat model on human benchmarks. Both the base and instruct models are released under the Apache 2.0 license.




Investigating Multi-source Active Learning for Natural Language Inference
In recent years, active learning has been successfully applied to an array of NLP tasks. However, prior work often assumes that training and test data are drawn from the same distribution. This is problematic, as in real-life settings data may stem from several sources of varying relevance and quality. We show that four popular active learning schemes fail to outperform random selection when applied to unlabelled pools comprised of multiple data sources on the task of natural language inference. We reveal that uncertainty-based strategies perform poorly due to the acquisition of collective outliers, i.e., hard-to-learn instances that hamper learning and generalization. When outliers are removed, strategies are found to recover and outperform random baselines. In further analysis, we find that collective outliers vary in form between sources, and show that hard-to-learn data is not always categorically harmful. Lastly, we leverage dataset cartography to introduce difficulty-stratified testing and find that different strategies are affected differently by example learnability and difficulty.


LExI: Layer-Adaptive Active Experts for Efficient MoE Model Inference
Mixture-of-Experts (MoE) models scale efficiently by activating only a subset of experts per token, offering a computationally sparse alternative to dense architectures. While prior post-training optimizations, such as inter- and intra-expert pruning, reduce memory usage they provide limited gains in inference-time compute efficiency. Moreover, existing MoE architectures typically activate a fixed number of experts uniformly across all layers, resulting in redundant computation and suboptimal performance. In this work, we first demonstrate that MoE pruning strategies improve only the memory footprint but do not significantly improve inference performance on GPU using optimized frameworks such as vLLM. To address this, we introduce LExI, a data-free optimization technique that determines the optimal number of active experts per layer in a pretrained MoE model. LExI leverages only the model weights to estimate the relative importance of each layer and adaptively assigns the number of active experts accordingly per layer. Experiments on state-of-the-art language and vision MoE benchmarks demonstrate that LExI significantly outperforms traditional MoE pruning approaches in terms of inference efficiency with negligible accuracy loss. For example, using LExI, Qwen1.5-MoE achieves the same throughput on Nvidia H100 GPU with 10% better accuracy than traditional expert pruning.

Active Data Curation Effectively Distills Large-Scale Multimodal Models
Knowledge distillation (KD) is the de facto standard for compressing large-scale models into smaller ones. Prior works have explored ever more complex KD strategies involving different objective functions, teacher-ensembles, and weight inheritance. In this work we explore an alternative, yet simple approach -- active data curation as effective distillation for contrastive multimodal pretraining. Our simple online batch selection method, ACID, outperforms strong KD baselines across various model-, data- and compute-configurations. Further, we find such an active data curation strategy to in fact be complementary to standard KD, and can be effectively combined to train highly performant inference-efficient models. Our simple and scalable pretraining framework, ACED, achieves state-of-the-art results across 27 zero-shot classification and retrieval tasks with upto 11% less inference FLOPs. We further demonstrate that our ACED models yield strong vision-encoders for training generative multimodal models in the LiT-Decoder setting, outperforming larger vision encoders for image-captioning and visual question-answering tasks.

Model Already Knows the Best Noise: Bayesian Active Noise Selection via Attention in Video Diffusion Model
The choice of initial noise significantly affects the quality and prompt alignment of video diffusion models, where different noise seeds for the same prompt can lead to drastically different generations. While recent methods rely on externally designed priors such as frequency filters or inter-frame smoothing, they often overlook internal model signals that indicate which noise seeds are inherently preferable. To address this, we propose ANSE (Active Noise Selection for Generation), a model-aware framework that selects high-quality noise seeds by quantifying attention-based uncertainty. At its core is BANSA (Bayesian Active Noise Selection via Attention), an acquisition function that measures entropy disagreement across multiple stochastic attention samples to estimate model confidence and consistency. For efficient inference-time deployment, we introduce a Bernoulli-masked approximation of BANSA that enables score estimation using a single diffusion step and a subset of attention layers. Experiments on CogVideoX-2B and 5B demonstrate that ANSE improves video quality and temporal coherence with only an 8% and 13% increase in inference time, respectively, providing a principled and generalizable approach to noise selection in video diffusion. See our project page: https://anse-project.github.io/anse-project/
Active-Dormant Attention Heads: Mechanistically Demystifying Extreme-Token Phenomena in LLMs
Practitioners have consistently observed three puzzling phenomena in transformer-based large language models (LLMs): attention sinks, value-state drains, and residual-state peaks, collectively referred to as extreme-token phenomena. These phenomena are characterized by certain so-called "sink tokens" receiving disproportionately high attention weights, exhibiting significantly smaller value states, and having much larger residual-state norms than those of other tokens. These extreme tokens give rise to various challenges in LLM inference, quantization, and interpretability. We elucidate the mechanisms behind extreme-token phenomena. First, we show that these phenomena arise in very simple architectures -- transformers with one to three layers -- trained on a toy model, the Bigram-Backcopy (BB) task. In this setting, we identify an active-dormant mechanism, where attention heads become sinks for specific input domains while remaining non-sinks for others. Our theoretical analysis of the training dynamics reveals that these phenomena are driven by a mutual reinforcement mechanism. Building on these insights, we propose strategies to mitigate extreme-token phenomena during pretraining, including replacing softmax with ReLU and Adam with SGD. Next, we extend our analysis to pretrained LLMs, including Llama and OLMo, showing that many attention heads exhibit a similar active-dormant mechanism as in the BB task, and that the mutual reinforcement mechanism also governs the emergence of extreme-token phenomena during LLM pretraining. Our results reveal that many of the static and dynamic properties of extreme-token phenomena predicted by the BB task align with observations in pretrained LLMs.

MAPLE: A Framework for Active Preference Learning Guided by Large Language Models
The advent of large language models (LLMs) has sparked significant interest in using natural language for preference learning. However, existing methods often suffer from high computational burdens, taxing human supervision, and lack of interpretability. To address these issues, we introduce MAPLE, a framework for large language model-guided Bayesian active preference learning. MAPLE leverages LLMs to model the distribution over preference functions, conditioning it on both natural language feedback and conventional preference learning feedback, such as pairwise trajectory rankings. MAPLE also employs active learning to systematically reduce uncertainty in this distribution and incorporates a language-conditioned active query selection mechanism to identify informative and easy-to-answer queries, thus reducing human burden. We evaluate MAPLE's sample efficiency and preference inference quality across two benchmarks, including a real-world vehicle route planning benchmark using OpenStreetMap data. Our results demonstrate that MAPLE accelerates the learning process and effectively improves humans' ability to answer queries.
Learning Neural Causal Models with Active Interventions
Discovering causal structures from data is a challenging inference problem of fundamental importance in all areas of science. The appealing properties of neural networks have recently led to a surge of interest in differentiable neural network-based methods for learning causal structures from data. So far, differentiable causal discovery has focused on static datasets of observational or fixed interventional origin. In this work, we introduce an active intervention targeting (AIT) method which enables a quick identification of the underlying causal structure of the data-generating process. Our method significantly reduces the required number of interactions compared with random intervention targeting and is applicable for both discrete and continuous optimization formulations of learning the underlying directed acyclic graph (DAG) from data. We examine the proposed method across multiple frameworks in a wide range of settings and demonstrate superior performance on multiple benchmarks from simulated to real-world data.

Fast Inference of Mixture-of-Experts Language Models with Offloading
With the widespread adoption of Large Language Models (LLMs), many deep learning practitioners are looking for strategies of running these models more efficiently. One such strategy is to use sparse Mixture-of-Experts (MoE) - a type of model architectures where only a fraction of model layers are active for any given input. This property allows MoE-based language models to generate tokens faster than their dense counterparts, but it also increases model size due to having multiple experts. Unfortunately, this makes state-of-the-art MoE language models difficult to run without high-end GPUs. In this work, we study the problem of running large MoE language models on consumer hardware with limited accelerator memory. We build upon parameter offloading algorithms and propose a novel strategy that accelerates offloading by taking advantage of innate properties of MoE LLMs. Using this strategy, we build can run Mixtral-8x7B with mixed quantization on desktop hardware and free-tier Google Colab instances.


Active Sensing of Knee Osteoarthritis Progression with Reinforcement Learning
Osteoarthritis (OA) is the most common musculoskeletal disease, which has no cure. Knee OA (KOA) is one of the highest causes of disability worldwide, and it costs billions of United States dollars to the global community. Prediction of KOA progression has been of high interest to the community for years, as it can advance treatment development through more efficient clinical trials and improve patient outcomes through more efficient healthcare utilization. Existing approaches for predicting KOA, however, are predominantly static, i.e. consider data from a single time point to predict progression many years into the future, and knee level, i.e. consider progression in a single joint only. Due to these and related reasons, these methods fail to deliver the level of predictive performance, which is sufficient to result in cost savings and better patient outcomes. Collecting extensive data from all patients on a regular basis could address the issue, but it is limited by the high cost at a population level. In this work, we propose to go beyond static prediction models in OA, and bring a novel Active Sensing (AS) approach, designed to dynamically follow up patients with the objective of maximizing the number of informative data acquisitions, while minimizing their total cost over a period of time. Our approach is based on Reinforcement Learning (RL), and it leverages a novel reward function designed specifically for AS of disease progression in more than one part of a human body. Our method is end-to-end, relies on multi-modal Deep Learning, and requires no human input at inference time. Throughout an exhaustive experimental evaluation, we show that using RL can provide a higher monetary benefit when compared to state-of-the-art baselines.

Latent State Inference in a Spatiotemporal Generative Model
Knowledge about the hidden factors that determine particular system dynamics is crucial for both explaining them and pursuing goal-directed interventions. Inferring these factors from time series data without supervision remains an open challenge. Here, we focus on spatiotemporal processes, including wave propagation and weather dynamics, for which we assume that universal causes (e.g. physics) apply throughout space and time. A recently introduced DIstributed SpatioTemporal graph Artificial Neural network Architecture (DISTANA) is used and enhanced to learn such processes, requiring fewer parameters and achieving significantly more accurate predictions compared to temporal convolutional neural networks and other related approaches. We show that DISTANA, when combined with a retrospective latent state inference principle called active tuning, can reliably derive location-respective hidden causal factors. In a current weather prediction benchmark, DISTANA infers our planet's land-sea mask solely by observing temperature dynamics and, meanwhile, uses the self inferred information to improve its own future temperature predictions.
Localizing Active Objects from Egocentric Vision with Symbolic World Knowledge
The ability to actively ground task instructions from an egocentric view is crucial for AI agents to accomplish tasks or assist humans virtually. One important step towards this goal is to localize and track key active objects that undergo major state change as a consequence of human actions/interactions to the environment without being told exactly what/where to ground (e.g., localizing and tracking the `sponge` in video from the instruction "Dip the `sponge` into the bucket."). While existing works approach this problem from a pure vision perspective, we investigate to which extent the textual modality (i.e., task instructions) and their interaction with visual modality can be beneficial. Specifically, we propose to improve phrase grounding models' ability on localizing the active objects by: (1) learning the role of `objects undergoing change` and extracting them accurately from the instructions, (2) leveraging pre- and post-conditions of the objects during actions, and (3) recognizing the objects more robustly with descriptional knowledge. We leverage large language models (LLMs) to extract the aforementioned action-object knowledge, and design a per-object aggregation masking technique to effectively perform joint inference on object phrases and symbolic knowledge. We evaluate our framework on Ego4D and Epic-Kitchens datasets. Extensive experiments demonstrate the effectiveness of our proposed framework, which leads to>54% improvements in all standard metrics on the TREK-150-OPE-Det localization + tracking task, >7% improvements in all standard metrics on the TREK-150-OPE tracking task, and >3% improvements in average precision (AP) on the Ego4D SCOD task.

Consensus-Driven Active Model Selection
The widespread availability of off-the-shelf machine learning models poses a challenge: which model, of the many available candidates, should be chosen for a given data analysis task? This question of model selection is traditionally answered by collecting and annotating a validation dataset -- a costly and time-intensive process. We propose a method for active model selection, using predictions from candidate models to prioritize the labeling of test data points that efficiently differentiate the best candidate. Our method, CODA, performs consensus-driven active model selection by modeling relationships between classifiers, categories, and data points within a probabilistic framework. The framework uses the consensus and disagreement between models in the candidate pool to guide the label acquisition process, and Bayesian inference to update beliefs about which model is best as more information is collected. We validate our approach by curating a collection of 26 benchmark tasks capturing a range of model selection scenarios. CODA outperforms existing methods for active model selection significantly, reducing the annotation effort required to discover the best model by upwards of 70% compared to the previous state-of-the-art. Code and data are available at https://github.com/justinkay/coda.

R-Sparse: Rank-Aware Activation Sparsity for Efficient LLM Inference
Large Language Models (LLMs), while demonstrating remarkable capabilities across various applications, present significant challenges during inference due to their substantial model size, especially when deployed on edge devices. Activation sparsity offers a promising solution to reduce computation and memory movement, enabling more efficient inference, particularly for small-batch on-device applications. However, current approaches face limitations with non-ReLU activation function, which are foundational to most advanced LLMs, or require heavy continual training. Additionally, the difficulty in predicting active channels and limited achievable sparsity ratios constrain the effectiveness of activation sparsity-based methods. In this paper, we introduce R-Sparse, a training-free activation sparsity approach capable of achieving high sparsity levels in advanced LLMs. We conducted two preliminary investigations into how different components contribute to the output within a single linear layer and found two key observations: (i) the non-sparse components of the input function can be regarded as a few bias terms, and (ii) The full computation can be effectively approximated by an appropriate combination of input channels and weight singular values. Building on this, we replace the linear layers in LLMs with a rank-aware sparse inference method that leverages the sparsity of input channels and singular value components, eliminating the need for active channel prediction like the output sparsity based approaches. Experiments on Llama-2/3 and Mistral models across ten diverse tasks demonstrate that R-Sparse achieves comparable performance at 50% model-level sparsity, resulting in a significant 43% end-to-end efficient improvements with customized kernels.

EchoWrist: Continuous Hand Pose Tracking and Hand-Object Interaction Recognition Using Low-Power Active Acoustic Sensing On a Wristband
Our hands serve as a fundamental means of interaction with the world around us. Therefore, understanding hand poses and interaction context is critical for human-computer interaction. We present EchoWrist, a low-power wristband that continuously estimates 3D hand pose and recognizes hand-object interactions using active acoustic sensing. EchoWrist is equipped with two speakers emitting inaudible sound waves toward the hand. These sound waves interact with the hand and its surroundings through reflections and diffractions, carrying rich information about the hand's shape and the objects it interacts with. The information captured by the two microphones goes through a deep learning inference system that recovers hand poses and identifies various everyday hand activities. Results from the two 12-participant user studies show that EchoWrist is effective and efficient at tracking 3D hand poses and recognizing hand-object interactions. Operating at 57.9mW, EchoWrist is able to continuously reconstruct 20 3D hand joints with MJEDE of 4.81mm and recognize 12 naturalistic hand-object interactions with 97.6% accuracy.
A Survey of Quantization Methods for Efficient Neural Network Inference
As soon as abstract mathematical computations were adapted to computation on digital computers, the problem of efficient representation, manipulation, and communication of the numerical values in those computations arose. Strongly related to the problem of numerical representation is the problem of quantization: in what manner should a set of continuous real-valued numbers be distributed over a fixed discrete set of numbers to minimize the number of bits required and also to maximize the accuracy of the attendant computations? This perennial problem of quantization is particularly relevant whenever memory and/or computational resources are severely restricted, and it has come to the forefront in recent years due to the remarkable performance of Neural Network models in computer vision, natural language processing, and related areas. Moving from floating-point representations to low-precision fixed integer values represented in four bits or less holds the potential to reduce the memory footprint and latency by a factor of 16x; and, in fact, reductions of 4x to 8x are often realized in practice in these applications. Thus, it is not surprising that quantization has emerged recently as an important and very active sub-area of research in the efficient implementation of computations associated with Neural Networks. In this article, we survey approaches to the problem of quantizing the numerical values in deep Neural Network computations, covering the advantages/disadvantages of current methods. With this survey and its organization, we hope to have presented a useful snapshot of the current research in quantization for Neural Networks and to have given an intelligent organization to ease the evaluation of future research in this area.


Towards MoE Deployment: Mitigating Inefficiencies in Mixture-of-Expert (MoE) Inference
Mixture-of-Experts (MoE) models have gained popularity in achieving state-of-the-art performance in a wide range of tasks in computer vision and natural language processing. They effectively expand the model capacity while incurring a minimal increase in computation cost during training. However, deploying such models for inference is difficult due to their large size and complex communication pattern. In this work, we provide a characterization of two MoE workloads, namely Language Modeling (LM) and Machine Translation (MT) and identify their sources of inefficiencies at deployment. We propose three optimization techniques to mitigate sources of inefficiencies, namely (1) Dynamic gating, (2) Expert Buffering, and (3) Expert load balancing. We show that dynamic gating improves maximum throughput by 6.21-11.23times for LM, 5.75-10.98times for MT Encoder and 2.58-5.71times for MT Decoder. It also reduces memory usage by up to 1.36times for LM and up to 1.1times for MT. We further propose Expert Buffering, a new caching mechanism that only keeps hot, active experts in GPU memory while buffering the rest in CPU memory. This reduces static memory allocation by up to 1.47times. We finally propose a load balancing methodology that provides additional scalability to the workload.
Learning fast, accurate, and stable closures of a kinetic theory of an active fluid
Important classes of active matter systems can be modeled using kinetic theories. However, kinetic theories can be high dimensional and challenging to simulate. Reduced-order representations based on tracking only low-order moments of the kinetic model serve as an efficient alternative, but typically require closure assumptions to model unrepresented higher-order moments. In this study, we present a learning framework based on neural networks that exploit rotational symmetries in the closure terms to learn accurate closure models directly from kinetic simulations. The data-driven closures demonstrate excellent a-priori predictions comparable to the state-of-the-art Bingham closure. We provide a systematic comparison between different neural network architectures and demonstrate that nonlocal effects can be safely ignored to model the closure terms. We develop an active learning strategy that enables accurate prediction of the closure terms across the entire parameter space using a single neural network without the need for retraining. We also propose a data-efficient training procedure based on time-stepping constraints and a differentiable pseudo-spectral solver, which enables the learning of stable closures suitable for a-posteriori inference. The coarse-grained simulations equipped with data-driven closure models faithfully reproduce the mean velocity statistics, scalar order parameters, and velocity power spectra observed in simulations of the kinetic theory. Our differentiable framework also facilitates the estimation of parameters in coarse-grained descriptions conditioned on data.
Efficiently Editing Mixture-of-Experts Models with Compressed Experts
Mixture-of-Experts (MoE) models have become a key approach for scaling large language models efficiently by activating only a subset of experts during training and inference. Typically, the number of activated experts presents a trade-off: fewer experts reduce computational costs, while more experts improve performance. Recent studies reveal that not all activated experts contribute equally to model performance, with some providing minimal utility, particularly when finetuning pretrained MoE models for specialized downstream tasks. The co-existence of significant and redundant parameters in experts provides us an opportunity to reduce the number of activated experts while maintaining model performance. In this work, we propose the concept of compressed experts, lightweight modules that serve as compact representations of full experts. Our approach preserves the most important experts while replacing other auxiliary activated experts with compressed experts. The reduction of active parameters significantly lowers inference costs while achieving comparable performance. Extensive experiments on models including Phi-MoE and OLMoE demonstrate that compressed experts recover over 90% of full expert performance across various tasks while reducing more than 30% active parameters and saving 20% in inference costs. This approach enables efficient deployment of MoE models in resource-constrained settings and facilitates scaling to larger models with manageable overhead. Our code is available at https://github.com/yifei-he/Compressed-Experts.

LMTurk: Few-Shot Learners as Crowdsourcing Workers in a Language-Model-as-a-Service Framework
Vast efforts have been devoted to creating high-performance few-shot learners, i.e., large-scale pretrained language models (PLMs) that perform well with little downstream task training data. Training PLMs has incurred significant cost, but utilizing the few-shot learners is still challenging due to their enormous size. This work focuses on a crucial question: How to make effective use of these few-shot learners? We propose LMTurk, a novel approach that treats few-shot learners as crowdsourcing workers. The rationale is that crowdsourcing workers are in fact few-shot learners: They are shown a few illustrative examples to learn about a task and then start annotating. LMTurk employs few-shot learners built upon PLMs as workers. We show that the resulting annotations can be utilized to train models that solve the task well and are small enough to be deployable in practical scenarios. Active learning is integrated into LMTurk to reduce the amount of queries made to PLMs, minimizing the computational cost of running PLM inference passes. Altogether, LMTurk is an important step towards making effective use of current PLMs.
DiffGAN-TTS: High-Fidelity and Efficient Text-to-Speech with Denoising Diffusion GANs
Denoising diffusion probabilistic models (DDPMs) are expressive generative models that have been used to solve a variety of speech synthesis problems. However, because of their high sampling costs, DDPMs are difficult to use in real-time speech processing applications. In this paper, we introduce DiffGAN-TTS, a novel DDPM-based text-to-speech (TTS) model achieving high-fidelity and efficient speech synthesis. DiffGAN-TTS is based on denoising diffusion generative adversarial networks (GANs), which adopt an adversarially-trained expressive model to approximate the denoising distribution. We show with multi-speaker TTS experiments that DiffGAN-TTS can generate high-fidelity speech samples within only 4 denoising steps. We present an active shallow diffusion mechanism to further speed up inference. A two-stage training scheme is proposed, with a basic TTS acoustic model trained at stage one providing valuable prior information for a DDPM trained at stage two. Our experiments show that DiffGAN-TTS can achieve high synthesis performance with only 1 denoising step.

Compass-V2 Technical Report
Predominant LLMs focus on high-resource languages while leaving low-resource languages, particularly those in Southeast Asia (SEA), underrepresented. In addition, those models are general-purpose and pay limited attention to the e-commerce domain. To overcome these limitations, we introduce Compass-v2, a lightweight Mixture-of-Experts (MoE) model specifically designed for Southeast Asian languages and e-commerce applications. To balance model performance and inference cost, the model is designed with 30B total parameters and 5B active parameters, incorporating both fine-grained and shared expert modules. To enhance multilingual performance, we curated and constructed a high-quality, industry-leading SEA dataset, to the best of our knowledge. To boost performance in the e-commerce domain, we built a dataset comprising hundreds of billions of tokens, sourced through external data mining and internal platform collection. Besides, we pioneered a hybrid reasoning model that supports both fast thinking and deep thinking within a unified framework to enhance the reasoning capabilities, diverging from the conventional industry practice of deploying two separate models. Through extensive experimental evaluations, our model demonstrates state-of-the-art SEA multilingual and e-commerce performance among sub-30B models, while maintaining significantly lower inference cost.

Quantifying and Optimizing Global Faithfulness in Persona-driven Role-playing
Persona-driven role-playing (PRP) aims to build AI characters that can respond to user queries by faithfully sticking with all persona statements. Unfortunately, existing faithfulness criteria for PRP are limited to coarse-grained LLM-based scoring without a clear definition or formulation. This paper presents a pioneering exploration to quantify PRP faithfulness as a fine-grained and explainable criterion, which also serves as a reliable reference for optimization. Our criterion first discriminates persona statements into active and passive constraints by identifying the query-statement relevance. Then, we incorporate all constraints following the principle that the AI character's response should be (a) entailed by active (relevant) constraints and (b) not contradicted by passive (irrelevant) constraints. We translate this principle mathematically into a novel Active-Passive-Constraint (APC) score, a constraint-wise sum of natural language inference (NLI) scores weighted by relevance scores. In practice, we build the APC scoring system by symbolically distilling small discriminators from GPT-4 for efficiency. We validate the quality of the APC score against human evaluation based on example personas with tens of statements, and the results show a high correlation. We further leverage it as a reward system in direct preference optimization (DPO) for better AI characters. Our experiments offer a fine-grained and explainable comparison between existing PRP techniques, revealing their advantages and limitations. We further find APC-based DPO to be one of the most competitive techniques for sticking with all constraints and can be well incorporated with other techniques. We then extend the scale of the experiments to real persons with hundreds of statements and reach a consistent conclusion.


MoNDE: Mixture of Near-Data Experts for Large-Scale Sparse Models
Mixture-of-Experts (MoE) large language models (LLM) have memory requirements that often exceed the GPU memory capacity, requiring costly parameter movement from secondary memories to the GPU for expert computation. In this work, we present Mixture of Near-Data Experts (MoNDE), a near-data computing solution that efficiently enables MoE LLM inference. MoNDE reduces the volume of MoE parameter movement by transferring only the hot experts to the GPU, while computing the remaining cold experts inside the host memory device. By replacing the transfers of massive expert parameters with the ones of small activations, MoNDE enables far more communication-efficient MoE inference, thereby resulting in substantial speedups over the existing parameter offloading frameworks for both encoder and decoder operations.
ServeGen: Workload Characterization and Generation of Large Language Model Serving in Production
With the widespread adoption of Large Language Models (LLMs), serving LLM inference requests has become an increasingly important task, attracting active research advancements. Practical workloads play an essential role in this process: they are critical for motivating and benchmarking serving techniques and systems. However, the existing understanding of real-world LLM serving workloads is limited due to the lack of a comprehensive workload characterization. Prior analyses remain insufficient in scale and scope, thus failing to fully capture intricate workload characteristics. In this paper, we fill the gap with an in-depth characterization of LLM serving workloads collected from our worldwide cloud inference serving service, covering not only language models but also emerging multimodal and reasoning models, and unveiling important new findings in each case. Moreover, based on our findings, we propose ServeGen, a principled framework for generating realistic LLM serving workloads by composing them on a per-client basis. A practical use case in production validates that ServeGen avoids 50% under-provisioning compared to naive workload generation, demonstrating ServeGen's advantage in performance benchmarking. We will open-source ServeGen to foster future research.
Efficient Diffusion Transformer Policies with Mixture of Expert Denoisers for Multitask Learning
Diffusion Policies have become widely used in Imitation Learning, offering several appealing properties, such as generating multimodal and discontinuous behavior. As models are becoming larger to capture more complex capabilities, their computational demands increase, as shown by recent scaling laws. Therefore, continuing with the current architectures will present a computational roadblock. To address this gap, we propose Mixture-of-Denoising Experts (MoDE) as a novel policy for Imitation Learning. MoDE surpasses current state-of-the-art Transformer-based Diffusion Policies while enabling parameter-efficient scaling through sparse experts and noise-conditioned routing, reducing both active parameters by 40% and inference costs by 90% via expert caching. Our architecture combines this efficient scaling with noise-conditioned self-attention mechanism, enabling more effective denoising across different noise levels. MoDE achieves state-of-the-art performance on 134 tasks in four established imitation learning benchmarks (CALVIN and LIBERO). Notably, by pretraining MoDE on diverse robotics data, we achieve 4.01 on CALVIN ABC and 0.95 on LIBERO-90. It surpasses both CNN-based and Transformer Diffusion Policies by an average of 57% across 4 benchmarks, while using 90% fewer FLOPs and fewer active parameters compared to default Diffusion Transformer architectures. Furthermore, we conduct comprehensive ablations on MoDE's components, providing insights for designing efficient and scalable Transformer architectures for Diffusion Policies. Code and demonstrations are available at https://mbreuss.github.io/MoDE_Diffusion_Policy/.


LLaDA-MoE: A Sparse MoE Diffusion Language Model
We introduce LLaDA-MoE, a large language diffusion model with the Mixture-of-Experts (MoE) architecture, trained from scratch on approximately 20T tokens. LLaDA-MoE achieves competitive performance with significantly reduced computational overhead by maintaining a 7B-parameter capacity while activating only 1.4B parameters during inference. Our empirical evaluation reveals that LLaDA-MoE achieves state-of-the-art performance among diffusion language models with larger parameters, surpassing previous diffusion language models LLaDA, LLaDA 1.5, and Dream across multiple benchmarks. The instruct-tuned model LLaDA-MoE-7B-A1B-Instruct demonstrates capabilities comparable to Qwen2.5-3B-Instruct in knowledge understanding, code generation, mathematical reasoning, agent and alignment tasks, despite using fewer active parameters. Our results show that integrating a sparse MoE architecture into the training objective of masked diffusion language models still brings out MoE's strengths under efficient inference with few active parameters, and opens ample room for further exploration of diffusion language models. LLaDA-MoE models are available at Huggingface.
Probabilistic Artificial Intelligence
Artificial intelligence commonly refers to the science and engineering of artificial systems that can carry out tasks generally associated with requiring aspects of human intelligence, such as playing games, translating languages, and driving cars. In recent years, there have been exciting advances in learning-based, data-driven approaches towards AI, and machine learning and deep learning have enabled computer systems to perceive the world in unprecedented ways. Reinforcement learning has enabled breakthroughs in complex games such as Go and challenging robotics tasks such as quadrupedal locomotion. A key aspect of intelligence is to not only make predictions, but reason about the uncertainty in these predictions, and to consider this uncertainty when making decisions. This is what this manuscript on "Probabilistic Artificial Intelligence" is about. The first part covers probabilistic approaches to machine learning. We discuss the differentiation between "epistemic" uncertainty due to lack of data and "aleatoric" uncertainty, which is irreducible and stems, e.g., from noisy observations and outcomes. We discuss concrete approaches towards probabilistic inference and modern approaches to efficient approximate inference. The second part of the manuscript is about taking uncertainty into account in sequential decision tasks. We consider active learning and Bayesian optimization -- approaches that collect data by proposing experiments that are informative for reducing the epistemic uncertainty. We then consider reinforcement learning and modern deep RL approaches that use neural network function approximation. We close by discussing modern approaches in model-based RL, which harness epistemic and aleatoric uncertainty to guide exploration, while also reasoning about safety.

Recognizing Extended Spatiotemporal Expressions by Actively Trained Average Perceptron Ensembles
Precise geocoding and time normalization for text requires that location and time phrases be identified. Many state-of-the-art geoparsers and temporal parsers suffer from low recall. Categories commonly missed by parsers are: nouns used in a non- spatiotemporal sense, adjectival and adverbial phrases, prepositional phrases, and numerical phrases. We collected and annotated data set by querying commercial web searches API with such spatiotemporal expressions as were missed by state-of-the- art parsers. Due to the high cost of sentence annotation, active learning was used to label training data, and a new strategy was designed to better select training examples to reduce labeling cost. For the learning algorithm, we applied an average perceptron trained Featurized Hidden Markov Model (FHMM). Five FHMM instances were used to create an ensemble, with the output phrase selected by voting. Our ensemble model was tested on a range of sequential labeling tasks, and has shown competitive performance. Our contributions include (1) an new dataset annotated with named entities and expanded spatiotemporal expressions; (2) a comparison of inference algorithms for ensemble models showing the superior accuracy of Belief Propagation over Viterbi Decoding; (3) a new example re-weighting method for active ensemble learning that 'memorizes' the latest examples trained; (4) a spatiotemporal parser that jointly recognizes expanded spatiotemporal expressions as well as named entities.